Fysiikkaa peliohjelmoijille - Osa 3: Törmäykset
Realistinen fysiikan mallinnus on noussut realistisen grafiikan rinnalle tärkeäksi elementiksi peleissä. Tämä artikkelisarja esittelee fysiikan mallinnuksen perusteet 2D- ja 3D-avaruudessa. Keskitymme erityisesti kiinteiden kappaleiden mekaniikkaan. Tämä on artikkelisarjan kolmas osa.
20.5.2005 julkaistun artikkelin on kirjoittanut markus.
1. Törmäystarkistus #
Voidaksemme reagoida törmäykseen, pitää se ensin havaita. Tätä varten on olemassa törmäystarkistus. Törmäystarkistus on puhtaasti geometrinen ongelma eikä fysikaalinen. Vasta, kun törmäystarkistus havaitsee törmäyksen, astuu fysiikka mukaan kuvaan törmäysvasteen muodossa.
Jotta törmäysvaste voitaisiin laskea, pitää törmäyksestä tietää seuraavat asiat: ajanhetki, kaikki kosketuspisteet ja pinnan normaalivektori kussakin kosketuspisteessä. Kuinka nämä asiat sitten lasketaan, se riippuu kappeleiden muodosta. Koska tässä artikkelisarjassa käsittelemme vain palloja ja laatikoita (ympyröitä ja suorakulmioita 2D-tapauksessa), esittelen törmäystarkistusrutiinit näille kappaleille. Törmäystarkistus voidaan tehdä kahdella eri tavalla: joko jatkuvana tai jaksottaisena.
Jatkuva törmäystarkastus kohtelee liikettä jatkumona ja pyrkii löytämään kosketuspisteet ja etenkin törmäyshetken täydellisen tarkasti. Tämä on mahdollista, jos kappaleet ovat yksinkertaisia, kuten palloja, mutta käy erittäin hankalaksi, jopa mahdottomaksi, vähänkin monimutkaisemmilla kappaleilla kuten laatikoilla. Tämän takia käytän tässä artikkelissa jaksottaista törmäystarkistusta.
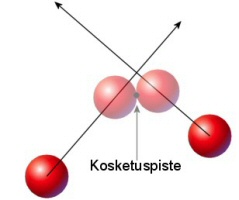
Jaksottainen törmäystarkistus on huomattavasti yksinkertaisempi ja usein myös ainut mahdollinen vaihtoehto. Siinä kappaleita siirretään eteenpäin pieni matka kerrallaan ja jokaisen siirron jälkeen tutkitaan leikkaako kappale toisen kappaleen. Jos leikkaa, kyseinen hetki merkitään törmäyshetkeksi, vaikka leikkauksen löytyessä kappaleet ovat jo ehtineet painua aavistuksen verran toistensa sisään. Kappaleiden painuminen sisäkkäin voidaan estää käyttämällä ns. "vaippaa". Vaipan ideana on päällystää kappale toisella aavistuksen verran isommalla kappaleella ja sitten tehdä törmäystarkistus tämän isomman kappaleen eli vaipan avulla. Törmäys katsotaan tapahtuneeksi, jos vaipat leikkaavat toisensa. Tällöin vaippojaan pienemmät alkuperäiset kappaleet eivät (välttämättä) ole vielä ehtineet painua sisäkkäin.
 Vasemmalla ideaalitapaus, jossa kappaleet vain koskettavat. Keskellä tyypillinen tapaus, jossa kappaleet pääsevät virheellisesti sisäkkäin. Oikealla tämä on estetty käyttämällä vaippoja, jotka leikkaavat vaikka kappaleet eivät sitä vielä tee.
Vasemmalla ideaalitapaus, jossa kappaleet vain koskettavat. Keskellä tyypillinen tapaus, jossa kappaleet pääsevät virheellisesti sisäkkäin. Oikealla tämä on estetty käyttämällä vaippoja, jotka leikkaavat vaikka kappaleet eivät sitä vielä tee.Kosketuspisteiden ja normaaleiden etsiminen ei ole jaksottaisessa törmäystarkistuksessa täysin yksiselitteinen juttu, sillä törmäyksen löydyttyä kappaleet ovat, joko painuneet hieman sisäkkäin, tai vaippoja käytettäessä ovet hieman erillään toisistaan. Tällöin kosketuspisteeksi valitaan kappaleen pinnalta piste, joka on syvimmällä toisen kappaleen sisässä (tai lähimpänä toista kappaletta, jos ne ovat erillään). Tämä johtaa siihen, että kummallakin kappaleella on eri kosketuspiste, eikä kosketuspiste ole näin ollen yksikäsitteinen. Ongelma ratkaistaan valitsemalla todelliseksi kosketuspisteeksi näistä jompikumpi tai käyttämällä keskiarvoa. Tässä artikkelissa tyydymme keskiarvoon. Emme myöskään käytä vaippoja vaan hyväksymme sen tosiasian, että kappaleet saattavat painua hieman sisäkkäin.
Kuitenkin, jos kappaleet painuvat liikaa sisäkkäin, alkaa tulla ongelmia. Tämän takia emme lue törmäykseksi tapausta, jossa kappaleet ovat liikaa sisäkkäin. Käsittäkäämme "liikaa" tällä kertaa tapaukseksi, jossa kappaleen keskipiste on toisen kappaleen sisässä.
Lopuksi rakenne, joka pitää sisällään kaiken tarvittavan kosketuspisteestä:
typedef struct
{
RIGIDBODY2D *body1; // Kosketuksen ensimmäinen osapuoli
RIGIDBODY2D *body2; // Kosketuksen toinen osapuoli
float p1[2]; // Ensimmäisen kappaleen kosketuspiste
float p2[2]; // Toisen kappaleen kosketuspiste
float normal[2]; // Kosketuspinnan normaali
float ap[2]; // Kosketuspisteiden keskiarvo
} CONTACTPOINT;
typedef struct
{
RIGIDBODY3D *body1; // Kosketuksen ensimmäinen osapuoli
RIGIDBODY3D *body2; // Kosketuksen toinen osapuoli
float p1[3]; // Ensimmäisen kappaleen kosketuspiste
float p2[3]; // Toisen kappaleen kosketuspiste
float normal[3]; // Kosketuspinnan normaali
float ap[3]; // Kosketuspisteiden keskiarvo
} CONTACTPOINT;
1.1 Pallo - Pallo #
Kahden pallon (tai 2D-tapauksessa ympyrän) välisen leikkauksen havaitseminen on helppoa, joten käsittelen sen ensimmäiseksi. Kaksi palloa tai ympyrää leikkaa toisensa, jos niiden keskipisteiden välinen etäisyys on pienempi tai yhtä suuri, kuin niiden säteiden summa. Siinä se. Kosketuspisteitä on tasan yksi (kummallakin) ja pinnan normaali kosketuspisteessä on pallojen keskipisteiden kautta kulkevan suoran suuntainen.
Seuraavassa on ympyröiden leikkausfunktio koodina. Se ottaa parametrinaan ympyröiden keskipisteiden sijainnit p1 ja p2 sekä säteet r1 ja r2. Funktio palauttaa kosketuspisteet muuttujiin i1 ja i2, sekä kosketuspisteen normaalin muuttujaan normal. Funktio palauttaa TRUE, jos ympyrät leikkaavat, ja FALSE jos eivät (tällöin muuttujien i1, i2 ja normal sisältö jää määrittelemättömäksi).
BOOL circleCircleIntersection(const float p1[2], float r1,
const float p2[2], float r2,
float i1[2], float i2[2],
float normal[2])
{
float d;
// Tee vektori toisesta ympyrästä toiseen
makeVector(normal, p2, p1);
// Laske vektorin pituus normalisoiden se samalla
d=normalizeVector(normal);
// Tarkista leikkaavatko ympyrät
if (d>r1+r2) return FALSE;
// Tarkista leikkaavatko ympyrät liikaa
if (d<r1 || d<r2) return FALSE;
// Laske leikkauspisteet
i1[0]=p1[0]-r1*normal[0];
i1[1]=p1[1]-r1*normal[1];
i2[0]=p2[0]+r2*normal[0];
i2[1]=p2[1]+r2*normal[1];
return TRUE;
}
Samoin myös kahden pallon tapauksessa, mutta tällöin käytämme vain kolme komponenttisia vektoreita.
BOOL sphereSphereIntersection(const float p1[3], float r1,
const float p2[3], float r2,
float i1[3], float i2[3],
float normal[3])
{
float d;
// Tee vektori toisesta pallosta toiseen
makeVector(normal, p2, p1);
// Laske vektorin pituus normalisoiden se samalla
d=normalizeVector(normal);
// Tarkista leikkaavatko pallot
if (d>r1+r2) return FALSE;
// Tarkista leikkaavatko pallot liikaa
if (d<r1 || d<r2) return FALSE;
// Laske leikkauspisteet
i1[0]=p1[0]-r1*normal[0];
i1[1]=p1[1]-r1*normal[1];
i1[2]=p1[2]-r1*normal[2];
i2[0]=p2[0]+r2*normal[0];
i2[1]=p2[1]+r2*normal[1];
i2[2]=p2[2]+r2*normal[2];
return TRUE;
}
1.2 Pallo - Laatikko #
Pallon ja laatikon välinen leikkaus on jo hankalampi, mutta periaate on sama kuin pallo-pallo tapauksessa. Pitää etsiä laatikolta palloa lähin piste ja tutkia sen etäisyys pallon keskipisteestä. Jos tämä etäisyys on pienempi tai yhtä suuri kuin pallon säde, kappaleet leikkaavat, muuten eivät.
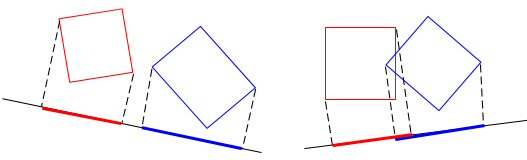
Testi olisi valtavan paljon helpompi, jos laatikko olisi suorassa koordinaattiakseleihin nähden ja sen keskipiste origossa. Niinpä ennen testiä kierrämme ja siirrämme koko systeemia niin, että pääsemme tällaiseen tilanteeseen. Teemme testin tässä helpommassa ympäristössä ja kierrämme ja siirrämme saadut tulokset tapaisin alkuperäiseen koordinaatistoon. Jos et tiedä kuinka koordinaatistomuunnos tehdään, lue artikkeli: ”Matriisimatematiikkaa peliohjelmoijille”.
 Etäisyyden laskeminen ”vinoon” laatikkoon on hankalaa (vasemmalla). Kierretään ja siirretään systeemiä niin, että laatikko tulee ”suoraan” ja origoon. Lasketaan etäisyys tässä systeemissä (keskellä). Lopputulos on sama kuin, jos etäisyys olisi laskettu alkutilanteessa (oikealla).
Etäisyyden laskeminen ”vinoon” laatikkoon on hankalaa (vasemmalla). Kierretään ja siirretään systeemiä niin, että laatikko tulee ”suoraan” ja origoon. Lasketaan etäisyys tässä systeemissä (keskellä). Lopputulos on sama kuin, jos etäisyys olisi laskettu alkutilanteessa (oikealla).Tässä artikkelisarjassa esitimme laatikon sijainnin, asennon (joko kulma tai kvaternio) ja "säteen" avulla. Voidaksemme laskea tarvittavat asiat, pitää näistä tiedoista ensin "purkaa" laatikon paikallisten koordinaattiakseleiden suuntaiset yksikkövektorit Tämän operaation saisimme tehtyä helpoiten käyttämällä artikkelisarjan aikaisemmissa osissa esiteltyä funktiota relativeToAbsolute(), joka antaa minkä tahansa kappaleen pinnalla olevan pisteen absoluuttiset koordinaatit, kun kappaleen sijainti ja asento tiedetään. Käytän kuitenkin laskennallisesti hieman kevyempää tapaa.
2D-tapauksessa akselit puretaan käyttämällä artikkelisarjan ensimmäisessä osassa esiteltyä pisteen pyörityskaavaa ja pyörittämällä x- ja y-akselin suuntaiset vektorit kappaleen mukaiseen asentoon.
void extractXAxisFromAngle(float x[2], float a)
{
x[0]=cos(a);
x[1]=sin(a);
}
void extractYAxisFromAngle(float y[2], float a)
{
y[0]=-sin(a);
y[1]=cos(a);
}
3D-tapauksessa samoin. Käytämme vain artikkelisarjan ensimmäisessä osassa esiteltyä kvaternioiden kertolaskua. Jos kertolaskukaavan kirjoittaa auki, ja sijoittaa pyöritettäväksi vektoriksi akselien suuntaiset yksikkövektorit saa kaavan sievenemään aika yksinkertaiseen muotoon.
void extractXAxisFromQuaternion(float v[3], const float q[4])
{
v[0]= q[0]*q[0] + q[1]*q[1] - q[2]*q[2] - q[3]*q[3];
v[1]= 2*q[1]*q[2] + 2*q[0]*q[3];
v[2]=-2*q[0]*q[2] + 2*q[1]*q[3];
}
void extractYAxisFromQuaternion(float v[3], const float q[4])
{
v[0]=2*q[1]*q[2] - 2*q[0]*q[3];
v[1]=q[0]*q[0] - q[1]*q[1] + q[2]*q[2] - q[3]*q[3];
v[2]=2*q[0]*q[1] + 2*q[2]*q[3];
}
void extractZAxisFromQuaternion(float v[3], const float q[4])
{
v[0]=2*q[0]*q[2] + 2*q[1]*q[3];
v[1]=-2*q[0]*q[1] + 2*q[2]*q[3];
v[2]=q[0]*q[0] - q[1]*q[1] - q[2]*q[2] + q[3]*q[3];
}
Kun laatikko on suorassa, lasketaan etäisyys jokaisella akselilla erikseen, ja lasketaan lopputulos Pythagoraan lauseella. Löydetty lähin piste laatikolta pitää tietenkin muuntaa takaisin alkuperäiseen systeemiin. Nyt meillä onkin koossa tarvittavat tiedot ja pääsemme koodiin. Otetaan ensin helpompi 2D-tapaus eli ympyrän ja suorakulmion leikkaus.
BOOL circleRectIntersection(const float p1[2], float r1,
const float p2[2], const float r2[2], float a,
float i1[2], float i2[2],
float normal[2])
{
float axis[2][2];
float offset[2];
float distance=0, d=0;
int i, inCount=0;
float p[2], temp[2];
// Pura tahojen normaalit asennosta
extractXAxisFromAngle(axis[0], a);
extractYAxisFromAngle(axis[1], a);
// Projisoi ympyrän keskipiste koordinaatistoon,
// jossa suorakulmio on "suorassa"
offset[0]=p1[0]-p2[0];
offset[1]=p1[1]-p2[1];
p[0]=dotProduct(offset, axis[0]);
p[1]=dotProduct(offset, axis[1]);
// Laske etäisyys laatikkoon ja lähin piste temp
// käyden läpi kaikki akselit.
for (i=0; i<2; i++)
{
// Ympyrä on kummankin reunan negatiivisella puolella
if (p[i]<-r2[i])
{
d=p[i]+r2[i];
distance+=d*d;
temp[i]=-r2[i];
}
else
{
// Ympyrä on kummankin reunan positiivisella puolella
if (p[i]>r2[i])
{
d=p[i]-r2[i];
distance+=d*d;
temp[i]=r2[i];
}
// Ympyrä on reunojen välissä
else
{
temp[i]=p[i];
inCount++;
}
}
}
// Testaa leikkaavatko ympyrä ja suorakulmio
if (distance>r1*r1) return FALSE;
// Leikkaavatko liikaa
if (inCount>=2) return FALSE;
// Laske kosketuspisteet. Projisoi kuitenkin ensin lähin
// piste takaisin alkuperäiseen koordinaatistoon
i2[0]=temp[0]*axis[0][0]+temp[1]*axis[1][0]+p2[0];
i2[1]=temp[0]*axis[0][1]+temp[1]*axis[1][1]+p2[1];
makeVector(normal, i2, p1);
normalizeVector(normal);
i1[0]=p1[0]-r1*normal[0];
i1[1]=p1[1]-r1*normal[1];
return TRUE;
}
Vastaavasti pallon ja laatikon leikkaus. Ainut ero on, että nyt on yksi akseli enemmän.
BOOL sphereBoxIntersection(const float p1[3], float r1,
const float p2[3], const float r2[3], float q[4],
float i1[3], float i2[3],
float normal[3])
{
float axis[3][3];
float offset[3];
float distance=0, d=0;
int i, inCount=0;
float p[3], temp[3];
// Pura tahojen normaalit asennosta
extractXAxisFromQuaternion(axis[0], q);
extractYAxisFromQuaternion(axis[1], q);
extractZAxisFromQuaternion(axis[2], q);
// Projisoi pallon keskipiste koordinaatistoon, jossa laatikko on "suorassa"
offset[0]=p1[0]-p2[0];
offset[1]=p1[1]-p2[1];
offset[2]=p1[2]-p2[2];
p[0]=dotProduct(offset, axis[0]);
p[1]=dotProduct(offset, axis[1]);
p[2]=dotProduct(offset, axis[2]);
// Laske etäisyys laatikkoon ja lähin piste temp
// käyden läpi kaikki akselit.
for (i=0; i<3; i++)
{
// Pallo on kummankin reunan negatiivisella puolella
if (p[i]<-r2[i])
{
d=p[i]+r2[i];
distance+=d*d;
temp[i]=-r2[i];
}
else
{
// Pallo on kummankin reunan positiivisella puolella
if (p[i]>r2[i])
{
d=p[i]-r2[i];
distance+=d*d;
temp[i]=r2[i];
}
// Pallo on reunojen välissä
else
{
temp[i]=p[i];
inCount++;
}
}
}
// Testaa leikkaavatko ympyrä ja laatikko
if (distance>r1*r1) return FALSE;
// Leikkaavatko liikaa
if (inCount>=3) return FALSE;
// Laske kosketuspisteet. Lähin piste temp siirretään
// ensin alkuperäiseen koordinaatistoon.
i2[0]=temp[0]*axis[0][0]+temp[1]*axis[1][0]+temp[2]*axis[2][0]+p2[0];
i2[1]=temp[0]*axis[0][1]+temp[1]*axis[1][1]+temp[2]*axis[2][1]+p2[1];
i2[2]=temp[0]*axis[0][2]+temp[1]*axis[1][2]+temp[2]*axis[2][2]+p2[2];
makeVector(normal, i2, p1);
normalizeVector(normal);
i1[0]=p1[0]-r1*normal[0];
i1[1]=p1[1]-r1*normal[1];
i1[2]=p1[2]-r1*normal[2];
return TRUE;
}
1.3 Laatikko - Laatikko #
Kaikkein hankalin tapaus, jota käsittelemme, on kahden laatikon välinen leikkaus. Toisin kuin ”pallon ja pallon” tai ”pallon ja laatikon” tapauksessa, jossa kosketuspisteitä oli vain yksi (kummallakin), kahdella laatikolla voi kosketuspisteen sijaan olla myös kosketusjana tai kosketuspinta. Janan ja pinnan käsittely pisteen sijaan on hankalaa, joten esitämme ne sarjana niitä rajoittavia pisteitä (max 2 (2D-tapaus) tai 8 (3D-tapaus)).
Puhuttaessa laatikoiden leikkauksesta useimmat artikkelit esittelevät ns. erottavan akselin algoritmin. Siinä on ideana, että jos kaksi laatikkoa EI leikkaa, on olemassa akseli (suora viiva), jolle projisoituna laatikot eivät myöskään leikkaa. Ai miksikö vaivautua projisoimaan? Koska akselille projisoituna 2D- tai 3D-laatikoista tulee yksiulotteisia, jolloin törmäyksen testaaminen on huomattavasti helpompaa. Laatikon 1D-projektio on symmetrinen keskipisteen suhteen, joten testi voidaan tehdä laskemalla projektioakselilla laatikoiden keskipisteiden välinen etäisyys ja ”säteet”. Jos etäisyys on suurempi kuin säteiden summa, laatikot eivät leikkaa, muuten leikkaavat.
 Jos kaksi laatikkoa ei leikkaa on mahdollista löytää sellainen akseli (suora viiva), jolle projisoituna laatikot eivät myöskään leikkaa (vasemmalla). Jos laatikot leikkaavat tälläistä akselia ei ole olemassa (oikealla).
Jos kaksi laatikkoa ei leikkaa on mahdollista löytää sellainen akseli (suora viiva), jolle projisoituna laatikot eivät myöskään leikkaa (vasemmalla). Jos laatikot leikkaavat tälläistä akselia ei ole olemassa (oikealla).Huono puoli on se, että 2D- tai 3D-avaruuteen voidaan sijoittaa äärettömän monta akselia, ja ne kaikki pitäisi tutkia. Tämä ei kuitenkaan ole tarpeen sillä voidaan osoittaa, että 2D-tapauksessa, jos erottava akseli on olemassa, se on jomman kumman laatikon tahon normaalivektorin suuntainen. Tarvitsee tutkia vain 4 akselia (kaksi kummallakin). 3D-tapauksessa tämä akseli on, joko tahon normaalivektorin suuntainen (6 eri akselia (3 kummallakin)), tai kahden tahon normaalivektorien ristitulon suuntainen (3 * 3 = 9 yhdistelmää). Yhteensä siis 6 + 9 = 15 akselia tutkittavaksi.
Olkoon u akselin suuntainen yksikkövektori ja p1 ja p2 laatikoiden keskipisteiden koordinaatit. Tällöin laatikoiden keskipisteiden etäisyys akselilla on
<center>u • (p1 - p2)</center>
Laatikon säde projektioakselilla saadaan seuraavalla kaavalla, jossa r on laatikon sivun puolittaja ja a laatikon paikallisen koordinaatiston koordinaatti akselit, jotka on siis purettu asennosta aiemmin kerrotulla tavalla.

Jos siis säteiden summa on pienempi kuin etäisyys, laatikot eivät leikkaa, muuten leikkaavat.
Erottavan akselin algoritmi ei kuitenkaan kerro mitään kosketuspisteistä, joten joudumme virittämään sitä hieman. Kun kaikki 4 (2D-tapaus) tai 15 (3D-tapaus) akselia on tutkittu, ja yksikään niistä ei osoittautunut erottavaksi akseliksi, valitaan akseleista se, jolla laatikot ovat vähiten päällekkäin. Tämä akseli valitaan törmäyksen suunnaksi eli myös kaikkien kosketuspisteiden normaalivektoriksi.
Seuraavaksi täytyy tunnistaa törmäyksen tyyppi. Se voi olla joko kärki-kärki, kärki-särmä, kärki-taho, särmä-särmä, särmä-taho tai taho-taho. Kärki-kärki ja kärki-särmä törmäykset ovat niin harvinaisia, että ne voidaan suosiolla unohtaa (=laskea toisenlaiseksi törmäykseksi). Lisäksi 2D avaruudessa kärki ja särmä ovat sama asia, joten 2D-avaruudessa jää ainoastaan kärki-taho ja taho-taho törmäykset.
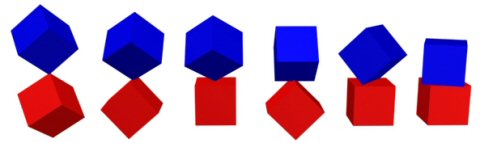 Kaikki 6 mahdollista laatikoiden törmäystä.
Kaikki 6 mahdollista laatikoiden törmäystä.Aloitetaan yksinkertaisemmalla 2D-tapauksella. Aluksi pitää tunnistaa se taho, jonka särmä tai toinen taho leikkaa. Tämä on jompi kumpi niistä tahoista, jonka normaalin suuntainen testattu akseli oli. Valinta tehdään tutkimalla kumman puolella toinen laatikko on. Sitten pitää löytää tahon leikkaavat kärjet. Tämä tehdään tutkimalla mitkä kärjistä ovat tahon takana. Jos kärkiä löytyi yksi, meillä on särmä-taho leikkaus, jos kaksi, taho-taho leikkaus, jos useampi, laatikot leikkaavat liikaa.
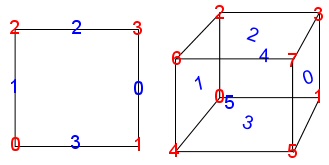
Voidaksemme tutkia ovatko kärjet tahon takapuolella pitää niiden koordinaatit ensin purkaa laatikon tiedoista. Tämä tehdään seuraamalla laatikon paikallisen koordinaatiston akseleita keskipisteestä. Sillä missä järjestyksessä kärjet puretaan, ei periaatteessa ole väliä, mutta käytämme oheisen kuvan mukaista numerointia kärjistä ja tahoista.
Kärjen tahon takana oleminen tehdään tutkimalla kärjen etäisyys tahon tasosta. Jos etäisyys on negatiivinen, kärki on tahon takana. Pisteen etäisyys tasosta lasketaan seuraavalla kaavalla:
pistetulo(tason_normaali, pisteen_sijainti)-pistetulo(tason_normaali, jokin_piste_tasolla)
Sama koodina.
BOOL isPointInFrontOfLine(const float p[2],
const float lineOrigin[2],
const float lineNormal[2])
{
if (dotProduct(p, lineNormal)-dotProduct(lineOrigin, lineNormal)<0)
return FALSE;
return TRUE;
}
BOOL isPointInFrontOfPlane(const float p[3],
const float planeOrigin[3],
const float planeNormal[3])
{
if (dotProduct(p, planeNormal)-dotProduct(planeOrigin, planeNormal)<0)
return FALSE;
return TRUE;
}
Jos kärki on tahon takana, valitaan se kosketuspisteeksi ja sen vastin pariksi toiselle kappaleella taholta lähin piste, joka löydetään seuraavalla funktiolla:
void closestPointOnLineSegment(float result[2],
const float a[2], const float b[2],
const float p[2])
{
float c[2], v[2];
float d, t;
makeVector(c, a, p);
makeVector(v, a, b);
d=normalizeVector(v);
t=dotProduct(v, c);
if (t < 0)
{
result[0]=a[0];
result[1]=a[1];
return;
}
if (t > d)
{
result[0]=b[0];
result[1]=b[1];
return;
}
v[0]*=t;
v[1]*=t;
result[0]=a[0]+v[0];
result[1]=a[1]+v[1];
}
Lopuksi saatetaan törmätä ongelmaan, että vaikka kärki onkin tahon takana, se ei ole tahon alueella. Tällöin kärkien muodostama särmä/taho pitää leikata niin, että siitä otetaan vain kuution sisään jäävä osa. Tarvitaan siis funktio, joka leikkaa janan kuutiota vasten. Tämä (kuten törmäys tarkistus yleensäkin) on pelkkää geometriaa, jota en ala näin fysiikka-artikkelissa enempää selitellä vaan anna suoraan koodin.
void clipLineSegmentToRect(const float a[2], const float b[2],
const float rectOrigin[2],
const float rectXAxis[2], const float rectYAxis[2],
const float rectRadius[2],
float *result)
{
static float temp1[4], temp2[4], o[2], n[2];
o[0]=rectOrigin[0]+rectRadius[0]*rectXAxis[0]+rectRadius[1]*rectYAxis[0];
o[1]=rectOrigin[1]+rectRadius[0]*rectXAxis[1]+rectRadius[1]*rectYAxis[1];
// leikkaa positiivinen X taho
clipLineSegmentToLine(a, b, o, rectXAxis, temp1);
// leikkaa positiivinen Y taho
clipLineSegmentToLine(&temp1[0], &temp1[2], o, rectYAxis, temp2);
o[0]=rectOrigin[0]-rectRadius[0]*rectXAxis[0]-rectRadius[1]*rectYAxis[0];
o[1]=rectOrigin[1]-rectRadius[0]*rectXAxis[1]-rectRadius[1]*rectYAxis[1];
n[0]=-rectXAxis[0];
n[1]=-rectXAxis[1];
// leikkaa negatiivinen X taho
clipLineSegmentToLine(&temp2[0], &temp2[2], o, n, temp1);
n[0]=-rectYAxis[0];
n[1]=-rectYAxis[1];
// leikkaa negatiivinen Y taho
clipLineSegmentToLine(&temp1[0], &temp1[2], o, n, temp2);
result[0]=temp2[0];
result[1]=temp2[1];
result[2]=temp2[2];
result[3]=temp2[3];
}
Sitten pääsemme varsinaiseen koodiin. Huomaa, että funktio palauttaa eri määrän kosketuspisteitä (1 tai 2) riippuen mikä oli törmäyksen tyyppi. Kosketuspisteet varastoidaan taulukkoon i1 ja i2 ja niin määrä muuttujaan iCount.
BOOL rectRectIntersection(const float p1[2], const float r1[2], float a1,
const float p2[2], const float r2[2], float a2,
float *i1, float *i2,
float normal[2], int *iCount)
{
static float axis[2][2][2];
static float vertex[2][4][2];
static const int faceIndex[4][2]={{1,3},{0,2},{2,3},{0,1}};
int i, j;
float s[2];
float d, t1, t2;
float mind=-1;
int iFace=0, iRect=0, iVertex[2];
float iNormal[2];
// Pura akselit
extractXAxisFromAngle(axis[0][0], a1);
extractYAxisFromAngle(axis[0][1], a1);
extractXAxisFromAngle(axis[1][0], a2);
extractYAxisFromAngle(axis[1][1], a2);
// Tutki kaikki 4 mahdollista akselia
makeVector(s, p1, p2);
for (j=0; j<2; j++)
{
for (i=0; i<2; i++)
{
// Onko tämä akseli erottava akseli
d=fabsf(dotProduct(s, axis[j][i]));
t1=r1[0]*fabsf(dotProduct(axis[0][0], axis[j][i]))+
r1[1]*fabsf(dotProduct(axis[0][1], axis[j][i]));
t2=r2[0]*fabsf(dotProduct(axis[1][0], axis[j][i]))+
r2[1]*fabsf(dotProduct(axis[1][1], axis[j][i]));
if (d>t1+t2) return FALSE;
// Onko tämä se akseli, jolla laatikot ovat vähiten päällekkäin
d=t1+t2-d;
if (mind<0 || d<mind)
{
// Tunnista leikkaukseen osallistuva taho
iRect=j;
if ((j==0)?(dotProduct(axis[j][i], s)>0):(dotProduct(axis[j][i], s)<0))
{
iFace=2*i;
iNormal[0]=axis[j][i][0];
iNormal[1]=axis[j][i][1];
}
else
{
iFace=2*i+1;
iNormal[0]=-axis[j][i][0];
iNormal[1]=-axis[j][i][1];
}
mind=d;
}
}
}
// Pura verteksit
for (i=0; i<4; i++)
{
vertex[0][i][0]=p1[0]+((i%2==0)?-r1[0]:r1[0])*axis[0][0][0]+
((i/2==0)?-r1[1]:r1[1])*axis[0][1][0];
vertex[0][i][1]=p1[1]+((i%2==0)?-r1[0]:r1[0])*axis[0][0][1]+
((i/2==0)?-r1[1]:r1[1])*axis[0][1][1];
}
for (i=0; i<4; i++)
{
vertex[1][i][0]=p2[0]+((i%2==0)?-r2[0]:r2[0])*axis[1][0][0]+
((i/2==0)?-r2[1]:r2[1])*axis[1][1][0];
vertex[1][i][1]=p2[1]+((i%2==0)?-r2[0]:r2[0])*axis[1][0][1]+
((i/2==0)?-r2[1]:r2[1])*axis[1][1][1];
}
// Etsi kosketuspisteet
// Käy läpi vastakappaleen verteksit
*iCount=0;
for (i=0; i<4; i++)
{
// Jos tämä verteksi on tahon takana tee siitä kosketuspiste
if (!isPointInFrontOfLine(vertex[(iRect+1)%2][i],
vertex[iRect][faceIndex[iFace][0]],
iNormal))
{
// Leikkaavatko kappaleet liikaa
if (*iCount>=2) return FALSE;
// Lisää vertksi kosketuspisteiden listaan
iVertex[*iCount]=i;
// Kasvata määrää
(*iCount)++;
}
}
if (*iCount==0) return FALSE;
// Tunnista törmäystapa
// Taho-verteksi
if (*iCount==1)
{
if (iRect==1)
{
i1[0]=vertex[0][iVertex[0]][0];
i1[1]=vertex[0][iVertex[0]][1];
closestPointOnLineSegment(i2,
vertex[1][faceIndex[iFace][0]],
vertex[1][faceIndex[iFace][1]],
vertex[0][iVertex[0]]);
normal[0]=iNormal[0];
normal[1]=iNormal[1];
}
else
{
i2[0]=vertex[1][iVertex[0]][0];
i2[1]=vertex[1][iVertex[0]][1];
closestPointOnLineSegment(i1,
vertex[0][faceIndex[iFace][0]],
vertex[0][faceIndex[iFace][1]],
vertex[1][iVertex[0]]);
normal[0]=-iNormal[0];
normal[1]=-iNormal[1];
}
}
// Taho-taho
else
{
if (iRect==1)
{
clipLineSegmentToRect(vertex[0][iVertex[0]], vertex[0][iVertex[1]],
p2, axis[1][0], axis[1][1], r2,
i1);
for (i=0; i<2; i++)
{
closestPointOnLineSegment(&i2[2*i],
vertex[1][faceIndex[iFace][0]],
vertex[1][faceIndex[iFace][1]],
&i1[2*i]);
}
normal[0]=iNormal[0];
normal[1]=iNormal[1];
}
else
{
clipLineSegmentToRect(vertex[1][iVertex[0]], vertex[1][iVertex[1]],
p1, axis[0][0], axis[0][1], r1,
i2);
for (i=0; i<2; i++)
{
closestPointOnLineSegment(&i1[2*i],
vertex[0][faceIndex[iFace][0]],
vertex[0][faceIndex[iFace][1]],
&i2[2*i]);
}
normal[0]=-iNormal[0];
normal[1]=-iNormal[1];
}
}
return TRUE;
}
Sitten 3D-tapaus. Tällä kertaa pitää ottaa huomioon tapaukset kärki-taho, särmä-taho, taho-taho ja särmä-särmä. Jos akseli, jolla laatikot olivat vähiten päällekkäin, on tahon normaalin suuntainen, voidaan menetellä samoin kuin 2D-tapauksessakin. Eli etsitään mitkä verteksit ovat tahon takana. Jos näitä verteksejä on yksi, on kyseessä kärki-taho törmäys, jos 2 särmä-taho ja jos 3 tai 4 taho-taho törmäys. Kyseiset verteksit otetaan kosketuspisteiksi ja niiden vastinpareiksi lähimmät pisteet toisen kuution taholta. Seuraavassa funktio, joka etsii nelikulmiolta pisteen joka on lähinnä pistettä p.
void closestPointOnQuad(float result[3],
const float c1[3],
const float c2[3],
const float c3[3],
const float c4[3],
const float p[3])
{
float normal[3];
float temp1[3], temp2[3];
float mind, d;
int i;
const float *c[4];
c[0]=c1; c[1]=c2; c[2]=c3; c[3]=c4;
// Etsi lähin piste nelikulmion tasolta
makeVector(temp1, c1, c2);
makeVector(temp2, c1, c3);
crossProduct(normal, temp1, temp2);
normalizeVector(normal);
closestPointOnPlane(result, c1, normal, p);
// Jos piste on nelikulmion sisässä palauta se
if (isPointOnQuad(result, c1, c2, c3, c4)) return;
// Muuten etsi piste nelikulmion reunalta
mind=-1;
for (i=0; i<4; i++)
{
closestPointOnLineSegment(temp1, c[i], c[(i+1)%4], p);
d=computeDistance(temp1, p);
if (mind<0 || d<mind)
{
mind=d;
result[0]=temp1[0];
result[1]=temp1[1];
result[2]=temp1[2];
}
}
}
Löydetty särmä/taho pitää vielä leikata kuutiota vasten, koska se ei saata olla kokonaisuudessaan tahon sisällä. Seuraavassa funktio, joka leikkaa janan (särmän) kuutiota vasten.
void clipLineSegmentToBox(const float a[3], const float b[3],
const float boxOrigin[3],
const float boxXAxis[3],
const float boxYAxis[3],
const float boxZAxis[3],
const float boxRadius[3],
float *result)
{
static float temp1[6], temp2[6], o[3], n[3];
o[0]=boxOrigin[0]+boxRadius[0]*boxXAxis[0]+
boxRadius[1]*boxYAxis[0]+boxRadius[2]*boxZAxis[0];
o[1]=boxOrigin[1]+boxRadius[0]*boxXAxis[1]+
boxRadius[1]*boxYAxis[1]+boxRadius[2]*boxZAxis[1];
o[2]=boxOrigin[2]+boxRadius[0]*boxXAxis[2]+
boxRadius[1]*boxYAxis[2]+boxRadius[2]*boxZAxis[2];
// leikkaa positiivinen X taho
clipLineSegmentToPlane(a, b, o, boxXAxis, temp1);
// leikkaa positiivinen Y taho
clipLineSegmentToPlane(&temp1[0], &temp1[3], o, boxYAxis, temp2);
// Leikka positiivinen Z taho
clipLineSegmentToPlane(&temp2[0], &temp2[3], o, boxZAxis, temp1);
o[0]=boxOrigin[0]-boxRadius[0]*boxXAxis[0]
-boxRadius[1]*boxYAxis[0]-boxRadius[2]*boxZAxis[0];
o[1]=boxOrigin[1]-boxRadius[0]*boxXAxis[1]
-boxRadius[1]*boxYAxis[1]-boxRadius[2]*boxZAxis[1];
o[2]=boxOrigin[2]-boxRadius[0]*boxXAxis[2]
-boxRadius[1]*boxYAxis[2]-boxRadius[2]*boxZAxis[2];
n[0]=-boxXAxis[0];
n[1]=-boxXAxis[1];
n[2]=-boxXAxis[2];
// leikkaa negatiivinen X taho
clipLineSegmentToPlane(&temp1[0], &temp1[3], o, n, temp2);
n[0]=-boxYAxis[0];
n[1]=-boxYAxis[1];
n[2]=-boxYAxis[2];
// leikkaa negatiivinen Y taho
clipLineSegmentToPlane(&temp2[0], &temp2[3], o, n, temp1);
n[0]=-boxZAxis[0];
n[1]=-boxZAxis[1];
n[2]=-boxZAxis[2];
// Leikkaa negatiivinen Z taho
clipLineSegmentToPlane(&temp1[0], &temp1[3], o, n, result);
}
Ja vielä funktio, joka leikkaa nelikulmion (tahon) laatikkoa vasten. Huomaa, että kun nelikulmio leikataan laatikkoa vasten saattaa tulospolygonissa olla jopa 8 kulmaa.
void clipQuadToBox(const float c1[3], const float c2[3],
const float c3[3], const float c4[3],
const float boxOrigin[3],
const float boxXAxis[3],
const float boxYAxis[3],
const float boxZAxis[3],
const float boxRadius[3],
float *result, int *count)
{
static float temp1[3*8], temp2[3*8], o[3], n[3];
int count1, count2;
temp1[0]=c1[0]; temp1[1]=c1[1]; temp1[2]=c1[2];
temp1[3]=c2[0]; temp1[4]=c2[1]; temp1[5]=c2[2];
temp1[6]=c3[0]; temp1[7]=c3[1]; temp1[8]=c3[2];
temp1[9]=c4[0]; temp1[10]=c4[1]; temp1[11]=c4[2];
o[0]=boxOrigin[0]+boxRadius[0]*boxXAxis[0]+
boxRadius[1]*boxYAxis[0]+boxRadius[2]*boxZAxis[0];
o[1]=boxOrigin[1]+boxRadius[0]*boxXAxis[1]+
boxRadius[1]*boxYAxis[1]+boxRadius[2]*boxZAxis[1];
o[2]=boxOrigin[2]+boxRadius[0]*boxXAxis[2]+
boxRadius[1]*boxYAxis[2]+boxRadius[2]*boxZAxis[2];
// leikkaa positiivinen X taho
clipPolygonToPlane(temp1, 4, o, boxXAxis, temp2, &count2);
// leikkaa positiivinen Y taho
clipPolygonToPlane(temp2, count2, o, boxYAxis, temp1, &count1);
// Leikka positiivinen Z taho
clipPolygonToPlane(temp1, count1, o, boxZAxis, temp2, &count2);
o[0]=boxOrigin[0]-boxRadius[0]*boxXAxis[0]
-boxRadius[1]*boxYAxis[0]-boxRadius[2]*boxZAxis[0];
o[1]=boxOrigin[1]-boxRadius[0]*boxXAxis[1]
-boxRadius[1]*boxYAxis[1]-boxRadius[2]*boxZAxis[1];
o[2]=boxOrigin[2]-boxRadius[0]*boxXAxis[2]
-boxRadius[1]*boxYAxis[2]-boxRadius[2]*boxZAxis[2];
n[0]=-boxXAxis[0];
n[1]=-boxXAxis[1];
n[2]=-boxXAxis[2];
// leikkaa negatiivinen X taho
clipPolygonToPlane(temp2, count2, o, n, temp1, &count1);
n[0]=-boxYAxis[0];
n[1]=-boxYAxis[1];
n[2]=-boxYAxis[2];
// leikkaa negatiivinen Y taho
clipPolygonToPlane(temp1, count1, o, n, temp2, &count2);
n[0]=-boxZAxis[0];
n[1]=-boxZAxis[1];
n[2]=-boxZAxis[2];
// Leikkaa negatiivinen Z taho
clipPolygonToPlane(temp2, count2, o, n, result, count);
}
Jos akseli taas oli ristitulon suuntainen, on kyseessä särmä-särmä törmäys. Tällöin kosketuspisteitä on yksi ja se saadaan etsimällä särmiltä lähinnä toisiaan olevat pisteet. Seuraavassa valmis funktio, joka etsii kahdelta suoralta pisteet, jotka ovat lähinnä toisiaan.
void closestPointsOnLines(const float line1Origin[3],
const float line1Direction[3],
const float line2Origin[3],
const float line2Direction[3],
float result1[3], float result2[3])
{
float u[3];
float a, b, c, d, e, s, t;
float det;
makeVector(u, line2Origin, line1Origin);
a=dotProduct(line1Direction, line1Direction);
b=dotProduct(line1Direction, line2Direction);
c=dotProduct(line2Direction, line2Direction);
d=dotProduct(line1Direction, u);
e=dotProduct(line2Direction, u);
det=a*c-b*b;
if (det==0)
{
s=0;
t=d/b;
}
else
{
s=(b*e-c*d)/det;
t=(a*e-b*d)/det;
}
result1[0]=line1Origin[0]+s*line1Direction[0];
result1[1]=line1Origin[1]+s*line1Direction[1];
result1[2]=line1Origin[2]+s*line1Direction[2];
result2[0]=line2Origin[0]+t*line2Direction[0];
result2[1]=line2Origin[1]+t*line2Direction[1];
result2[2]=line2Origin[2]+t*line2Direction[2];
}
Vihdoin pääsemme varsinaiseen koodiin. Tämä on aika pitkä, koska pitää ottaa huomioon monta eri tapausta. Lyhensin koodia hieman käsittelemällä tapauksen, jossa 3 verteksiä on tahon takana ”väärin”.
BOOL boxBoxIntersection(const float p1[3], const float r1[3], float q1[4],
const float p2[3], const float r2[3], float q2[4],
float *i1, float *i2,
float normal[3], int *iCount)
{
static float axis[2][3][3];
static float vertex[2][8][3];
static const int faceIndex[6][4]={{1,3,7,5},{0,4,6,2},{7,3,2,6},
{5,4,0,1},{6,4,5,7},{2,3,1,0}};
float tempAxis[3];
int i, j;
float s[3];
float d, t1, t2;
float mind=-1;
int iFace=0, iRect=0, iVertex[4];
int iEdgePoint[2], iEdge[2];
float iNormal[3];
BOOL edgeEdge=FALSE;
float *sorted[4];
// Pura akselit
extractXAxisFromQuaternion(axis[0][0], q1);
extractYAxisFromQuaternion(axis[0][1], q1);
extractZAxisFromQuaternion(axis[0][2], q1);
extractXAxisFromQuaternion(axis[1][0], q2);
extractYAxisFromQuaternion(axis[1][1], q2);
extractZAxisFromQuaternion(axis[1][2], q2);
// Tutki kaikki 15 mahdollista akselia
makeVector(s, p1, p2);
// Tutki tahojen suuntaiset akselit
for (j=0; j<2; j++)
{
for (i=0; i<3; i++)
{
// Onko tämä akseli erottava akseli
d=fabsf(dotProduct(s, axis[j][i]));
t1=r1[0]*fabsf(dotProduct(axis[0][0], axis[j][i]))+
r1[1]*fabsf(dotProduct(axis[0][1], axis[j][i]))+
r1[2]*fabsf(dotProduct(axis[0][2], axis[j][i]));
t2=r2[0]*fabsf(dotProduct(axis[1][0], axis[j][i]))+
r2[1]*fabsf(dotProduct(axis[1][1], axis[j][i]))+
r2[2]*fabsf(dotProduct(axis[1][2], axis[j][i]));
if (d>t1+t2) return FALSE;
// Onko tämä se akseli, jolla laatikot ovat vähiten päällekkäin
d=t1+t2-d;
if (mind<0 || d<mind)
{
// Tunnista leikkaukseen osallistuva taho
iRect=j;
if ((j==0)?(dotProduct(axis[j][i], s)>0):(dotProduct(axis[j][i], s)<0))
{
iFace=2*i;
iNormal[0]=axis[j][i][0];
iNormal[1]=axis[j][i][1];
iNormal[2]=axis[j][i][2];
}
else
{
iFace=2*i+1;
iNormal[0]=-axis[j][i][0];
iNormal[1]=-axis[j][i][1];
iNormal[2]=-axis[j][i][2];
}
mind=d;
}
}
}
// Tutki ristitulojen suuntaiset akselit
for (i=0; i<3; i++)
{
for (j=0; j<3; j++)
{
// Ota akselien ristitulo
crossProduct(tempAxis, axis[0][i], axis[1][j]);
if (normalizeVector(tempAxis)<0.01) continue;
// Onko tämä akseli erottava akseli
d=fabsf(dotProduct(s, tempAxis));
t1=r1[0]*fabsf(dotProduct(axis[0][0], tempAxis))+
r1[1]*fabsf(dotProduct(axis[0][1], tempAxis))+
r1[2]*fabsf(dotProduct(axis[0][2], tempAxis));
t2=r2[0]*fabsf(dotProduct(axis[1][0], tempAxis))+
r2[1]*fabsf(dotProduct(axis[1][1], tempAxis))+
r2[2]*fabsf(dotProduct(axis[1][2], tempAxis));
if (d>t1+t2) return FALSE;
// Onko tämä se akseli, jolla laatikot ovat vähiten päällekkäin
d=t1+t2-d;
if (mind<0 || d<mind)
{
// Tunnista leikkaavat särmät
edgeEdge=TRUE;
iEdge[0]=i;
iEdge[1]=j;
if (dotProduct(tempAxis, s)<0)
{
iNormal[0]=tempAxis[0];
iNormal[1]=tempAxis[1];
iNormal[2]=tempAxis[2];
}
else
{
iNormal[0]=-tempAxis[0];
iNormal[1]=-tempAxis[1];
iNormal[2]=-tempAxis[2];
}
iEdgePoint[0]=((dotProduct(iNormal, axis[0][0])<0)?1:0)+
((dotProduct(iNormal, axis[0][1])<0)?2:0)+
((dotProduct(iNormal, axis[0][2])<0)?4:0);
iEdgePoint[1]=((dotProduct(iNormal, axis[1][0])>0)?1:0)+
((dotProduct(iNormal, axis[1][1])>0)?2:0)+
((dotProduct(iNormal, axis[1][2])>0)?4:0);
mind=d;
}
}
}
// Pura verteksit
for (i=0; i<8; i++)
{
vertex[0][i][0]=p1[0]+((i%2==0)? -r1[0]:r1[0])*axis[0][0][0]+
(((i/2)%2==0)?-r1[1]:r1[1])*axis[0][1][0]+
((i/4==0)? -r1[2]:r1[2])*axis[0][2][0];
vertex[0][i][1]=p1[1]+((i%2==0)? -r1[0]:r1[0])*axis[0][0][1]+
(((i/2)%2==0)?-r1[1]:r1[1])*axis[0][1][1]+
((i/4==0)? -r1[2]:r1[2])*axis[0][2][1];
vertex[0][i][2]=p1[2]+((i%2==0)? -r1[0]:r1[0])*axis[0][0][2]+
(((i/2)%2==0)?-r1[1]:r1[1])*axis[0][1][2]+
((i/4==0)? -r1[2]:r1[2])*axis[0][2][2];
}
for (i=0; i<8; i++)
{
vertex[1][i][0]=p2[0]+((i%2==0)? -r2[0]:r2[0])*axis[1][0][0]+
(((i/2)%2==0)?-r2[1]:r2[1])*axis[1][1][0]+
((i/4==0)? -r2[2]:r2[2])*axis[1][2][0];
vertex[1][i][1]=p2[1]+((i%2==0)? -r2[0]:r2[0])*axis[1][0][1]+
(((i/2)%2==0)?-r2[1]:r2[1])*axis[1][1][1]+
((i/4==0)? -r2[2]:r2[2])*axis[1][2][1];
vertex[1][i][2]=p2[2]+((i%2==0)? -r2[0]:r2[0])*axis[1][0][2]+
(((i/2)%2==0)?-r2[1]:r2[1])*axis[1][1][2]+
((i/4==0)? -r2[2]:r2[2])*axis[1][2][2];
}
// Tunnista törmäystapa
*iCount=0;
// Särmä-särmä
if (edgeEdge)
{
*iCount=1;
closestPointsOnLines(vertex[0][iEdgePoint[0]], axis[0][iEdge[0]],
vertex[1][iEdgePoint[1]], axis[1][iEdge[1]],
i1, i2);
normal[0]=iNormal[0];
normal[1]=iNormal[1];
normal[2]=iNormal[2];
}
else
{
// Käy läpi vastakappaleen verteksit
for (i=0; i<8; i++)
{
// Jos tämä verteksi on tahon takana tee siitä kosketuspiste
if (!isPointInFrontOfPlane(vertex[(iRect+1)%2][i],
vertex[iRect][faceIndex[iFace][0]], iNormal))
{
// Leikkaavatko kappaleet liikaa
if (*iCount>=4) return FALSE;
// Lisää vertksi kosketuspisteiden listaan
iVertex[*iCount]=i;
// Kasvata määrää
(*iCount)++;
}
}
if (*iCount==0) return FALSE;
// verteksi-taho
if (*iCount==1)
{
if (iRect==1)
{
i1[0]=vertex[0][iVertex[0]][0];
i1[1]=vertex[0][iVertex[0]][1];
i1[2]=vertex[0][iVertex[0]][2];
closestPointOnQuad(&i2[0],
vertex[1][faceIndex[iFace][0]],
vertex[1][faceIndex[iFace][1]],
vertex[1][faceIndex[iFace][2]],
vertex[1][faceIndex[iFace][3]],
vertex[0][iVertex[0]]);
normal[0]=iNormal[0];
normal[1]=iNormal[1];
normal[2]=iNormal[2];
}
else
{
i2[0]=vertex[1][iVertex[0]][0];
i2[1]=vertex[1][iVertex[0]][1];
i2[2]=vertex[1][iVertex[0]][2];
closestPointOnQuad(&i1[0],
vertex[0][faceIndex[iFace][0]],
vertex[0][faceIndex[iFace][1]],
vertex[0][faceIndex[iFace][2]],
vertex[0][faceIndex[iFace][3]],
vertex[1][iVertex[0]]);
normal[0]=-iNormal[0];
normal[1]=-iNormal[1];
normal[2]=-iNormal[2];
}
}
// särmä-taho
else if (*iCount==2 || *iCount==3)
{
if (iRect==1)
{
clipLineSegmentToBox(vertex[0][iVertex[0]], vertex[0][iVertex[1]],
p2, axis[1][0], axis[1][1], axis[1][2], r2,
i1);
for (i=0; i<2; i++)
{
closestPointOnQuad(&i2[3*i],
vertex[1][faceIndex[iFace][0]],
vertex[1][faceIndex[iFace][1]],
vertex[1][faceIndex[iFace][2]],
vertex[1][faceIndex[iFace][3]],
&i1[3*i]);
}
normal[0]=iNormal[0];
normal[1]=iNormal[1];
normal[2]=iNormal[2];
}
else
{
clipLineSegmentToBox(vertex[1][iVertex[0]], vertex[1][iVertex[1]],
p1, axis[0][0], axis[0][1], axis[0][2], r1,
i2);
for (i=0; i<2; i++)
{
closestPointOnQuad(&i1[3*i],
vertex[0][faceIndex[iFace][0]],
vertex[0][faceIndex[iFace][1]],
vertex[0][faceIndex[iFace][2]],
vertex[0][faceIndex[iFace][3]],
&i2[3*i]);
}
normal[0]=-iNormal[0];
normal[1]=-iNormal[1];
normal[2]=-iNormal[2];
}
}
// Taho-taho
else
{
if (iRect==1)
{
sortQuadVertices(sorted,
vertex[0][iVertex[0]], vertex[0][iVertex[1]],
vertex[0][iVertex[2]], vertex[0][iVertex[3]]);
clipQuadToBox(sorted[0], sorted[1], sorted[2], sorted[3],
p2, axis[1][0], axis[1][1], axis[1][2], r2,
i1, iCount);
for (i=0; i<*iCount; i++)
{
closestPointOnQuad(&i2[3*i],
vertex[1][faceIndex[iFace][0]],
vertex[1][faceIndex[iFace][1]],
vertex[1][faceIndex[iFace][2]],
vertex[1][faceIndex[iFace][3]],
&i1[3*i]);
}
normal[0]=iNormal[0];
normal[1]=iNormal[1];
normal[2]=iNormal[2];
}
else
{
sortQuadVertices(sorted,
vertex[1][iVertex[0]], vertex[1][iVertex[1]],
vertex[1][iVertex[2]], vertex[1][iVertex[3]]);
clipQuadToBox(sorted[0], sorted[1], sorted[2], sorted[3],
p1, axis[0][0], axis[0][1], axis[0][2], r1,
i2, iCount);
for (i=0; i<*iCount; i++)
{
closestPointOnQuad(&i1[3*i],
vertex[0][faceIndex[iFace][0]],
vertex[0][faceIndex[iFace][1]],
vertex[0][faceIndex[iFace][2]],
vertex[0][faceIndex[iFace][3]],
&i2[3*i]);
}
normal[0]=-iNormal[0];
normal[1]=-iNormal[1];
normal[2]=-iNormal[2];
}
}
}
if (*iCount==0) return FALSE;
return TRUE;
}
2. Impulssi #
Mitä mahtaakaan tapahtua, kun oikeassa maailmassa kaksi kappaletta törmää toisiinsa? Kappaleet eivät suinkaan painaudu sisäkkäin, vaikka ne ovat atomien mittakaavassa tarkasteltuna lähes pelkkää tyhjää, vaan ne kimpoavat toisistaan tai pysähtyvät paikalleen. Miksihän? Tämän saa aikaan atomien ja molekyylien mittakaavassa vaikuttava sähkömagneettinen voima.
Voima on kuitenkin niin valtavan suuri ja vaikuttaa niin tavattoman lyhyen aikavälin aikana, ettei sitä pystytä simuloimaan integraattorin avulla (varsinkaan reaaliajassa). Sen sijaan esittelemme uuden suureen nimeltä impulssi (englanniksi impulse). Impulssin symboli on I ja yksikkö Newton sekunti. Impulssi on vektori, jonka suunta esittää impulssin suuntaa ja pituus voimakkuutta. Impulssi on eräänlainen voiman kertymä, joka kertoo voiman kokonaisvaikutuksen joltain ajalta. Jos tiedämme törmäyksen aiheuttaman impulssin I, voimme laskea uuden nopeuden seuraavasta kaavasta, jossa m tarkoittaa kappaleen massaa.
Vastaavasti uuden pyörimisnopeuden voi laskea samasta impulsista kaavasta, jossa p tarkoittaa kosketuspistettä, x kappaleen keskipistettä ja J hitausmomenttia:
Sama koodina. Ensin 2D ja sitten 3D. 2D-tapauksessa törmäämme tilanteeseen, jossa pitää laskea vektoreiden ristitulo vaikka vektorit ovat kaksi komponenttisia. Ratkaisu on ajatella tapaus 3D-tapaukseksi ja tehdä kaikista kolme komponenttiset vektorit.
void applyImpulseToBody(RIGIDBODY2D *b,
const float I[2], const float p[2])
{
float temp1[3], temp2[3], c[3];
// Vaikuta nopeuteen
b->velocity[0]+=b->inverseMass*I[0];
b->velocity[1]+=b->inverseMass*I[1];
// Vaikuta pyörimisnopeuteen
temp1[0]=p[0]-b->position[0];
temp1[1]=p[1]-b->position[1];
temp1[2]=0;
temp2[0]=I[0];
temp2[1]=I[1];
temp2[2]=0;
crossProduct(c, temp1, temp2);
b->angularVelocity+=b->inverseMomentOfInertia*c[2];
}
void applyImpulseToBody(RIGIDBODY3D *b,
const float I[3], const float p[3])
{
float temp1[3], c[3];
static float qMatrix[9], tempMatrix[9], J[9];
// Vaikuta nopeuteen
b->velocity[0]+=b->inverseMass*I[0];
b->velocity[1]+=b->inverseMass*I[1];
b->velocity[2]+=b->inverseMass*I[2];
// Vaikuta pyörimisnopeuteen
makeVector(temp1, b->position, p);
crossProduct(c, temp1, I);
// Ota asento ensin huomioon hitausmomentissa
generateQuaternionMatrix(qMatrix, b->orientation);
multMatrix(tempMatrix, qMatrix, b->inverseMomentOfInertia);
transposeMatrix(qMatrix);
multMatrix(J, tempMatrix, qMatrix);
multMatrixWithVector(temp1, J, c);
b->angularVelocity[0]+=temp1[0];
b->angularVelocity[1]+=temp1[1];
b->angularVelocity[2]+=temp1[2];
}
Helppoa, mutta kuinka laskemme impulssin I? Impulssin laskemiseen tarvittavat kaavat voidaan johtaa energian- ja liikemääränsäilymislaista, mutta en ala niitä johtamaan vaan annan kaavat suoraan. Huomaa kaavoissa esiintyvä kimmokertoimeksi kutsuttu vakio ε, joka kertoo kuinka suuri osa energiasta säilyy törmäyksessä. Arvolla 1 kaikki energia säilyy ja kappaleet kimpoavat toisistaan täydellä voimalla. Arvolla 0 taas kaikki energia häviää (muuttuu lämmöksi, ääneksi yms.) ja kappaleet vain pysähtyvät.
Kaavoissa ilmenee myös symboli v, joka tarkoittaa tällä kertaa kosketuspisteen nopeutta. Tiedämme kyllä kappaleen nopeuden ja kappaleen pyörimisnopeuden. Kuinka laskemme näistä yksittäisen (kappaleen pinnalla olevan) pisteen nopeuden? Jos kappale ei pyörisi, olisi kappaleen minkä tahansa pisteen nopeus sama, kuin kappaleen itsensä nopeus, mutta pyöriminen mutkistaa asioita. Kappaleen pisteen p nopeus lasketaan kaavalla:

Kaavassa x tarkoittaa kappaleen keskipisteen sijaintia. Pisteellä on siis eri nopeus riippuen siitä mihin kappaleeseen katsomme sen kuuluvaksi. Impulssin laskukaavoissa käytän merkintöjä v<sub>a</sub> ja v<sub>b</sub>. V<sub>a</sub> tarkoittaa pisteen nopeutta kun se katsottaisiin kuuluvaksi kaapaleeseen a ja v<sub>b</sub> tarkoittaa pisteen nopeutta, kun se katsottaisiin kuuluvaksi kappaleeseen b.
Sama koodina ensin 2D ja sitten 3D.
void pointVelocity(float result[2],
const float p[2], const RIGIDBODY2D *b)
{
float W[3], P[3], temp[3];
W[0]=0;
W[1]=0;
W[2]=b->angularVelocity;
P[0]=p[0]-b->position[0];
P[1]=p[1]-b->position[1];
P[2]=0;
crossProduct(temp, W, P);
result[0]=b->velocity[0]+temp[0];
result[1]=b->velocity[1]+temp[1];
}
void pointVelocity(float result[3],
const float p[3], const RIGIDBODY3D *b)
{
float P[3], temp[3];
P[0]=p[0]-b->position[0];
P[1]=p[1]-b->position[1];
P[2]=p[2]-b->position[2];
crossProduct(temp, b->angularVelocity, P);
result[0]=b->velocity[0]+temp[0];
result[1]=b->velocity[1]+temp[1];
result[2]=b->velocity[2]+temp[2];
}
Aloitetaan impulssikaavat 2D-tapauksesta. Yksinkertaistetaan asiaa vielä niin, että emme aluksi ota pyörimisliikettä huomioon. Kun kaksi kappaletta a ja b törmää, saadaan impulssi I kaavasta
Seuraavaksi 2D-kaava impulsille, joka ottaa myös pyörimisen huomioon. (Huomaa, että vektorin toinen potenssi tarkoittaa vektorin pistetuloa itsensä kanssa ja ristituloa varten kaksi komponenttisiin vektoreihin pitää lisätä kolmas nolla komponentti.)

Seuraavassa sama koodina:
void computeImpulse(float I[2],
const float e,
const float v1[2], const float v2[2],
const float p[2], const float n[2],
const RIGIDBODY2D *b1, const RIGIDBODY2D *b2)
{
float a, temp1[3], temp2[3], c1[3], c2[3], v[2];
v[0]=v1[0]-v2[0];
v[1]=v1[1]-v2[1];
a = -(1+e)*dotProduct(v, n);
temp1[0]=p[0]-b1->position[0];
temp1[1]=p[1]-b1->position[1];
temp1[2]=0;
temp2[0]=n[0];
temp2[1]=n[1];
temp2[2]=0;
crossProduct(c1, temp1, temp2);
temp1[0]=p[0]-b2->position[0];
temp1[1]=p[1]-b2->position[1];
temp1[2]=0;
crossProduct(c2, temp1, temp2);
a/= b1->inverseMass + b2->inverseMass +
b1->inverseMomentOfInertia*(c1[0]*c1[0]+c1[1]*c1[1]+c1[2]*c1[2]) +
b2->inverseMomentOfInertia*(c2[0]*c2[0]+c2[1]*c2[1]+c2[2]*c2[2]);
I[0]=a*n[0];
I[1]=a*n[1];
}
Sitten 3D-tapaukseen. Ensin kaava impulssille 3D-avaruudessa, ilman että pyörimistä otetaan huomioon.
Lopuksi 3D-kaava, joka ottaa myös pyörimisen huomioon. Älä järkyty, tämä näyttää tosi pahalta.

Kaikkea kivaa, kuten matriiseja, vektoreita, pistetuloja, ristituloja jne. ja vieläpä samassa kaavassa. Kaikki tarvittava kaavan laskemiseksi on jo kerrottu tässä artikkelisarjassa, joten tässä sama kaava koodina:
void computeImpulse(float I[3],
const float e,
const float v1[3], const float v2[3],
const float p[3], const float n[3],
const RIGIDBODY3D *b1, const RIGIDBODY3D *b2)
{
static float qMatrix[9], tempMatrix[9], J[9];
static float a, P[3], c1[3], c2[3], temp1[3], temp2[2], v[3];
v[0]=v1[0]-v2[0];
v[1]=v1[1]-v2[1];
v[2]=v1[2]-v2[2];
a = -(1+e)*dotProduct(v, n);
// Ota asento huomioon hitausmomentissa
generateQuaternionMatrix(qMatrix, b1->orientation);
multMatrix(tempMatrix, qMatrix, b1->inverseMomentOfInertia);
transposeMatrix(qMatrix);
multMatrix(J, tempMatrix, qMatrix);
makeVector(P, p, b1->position);
crossProduct(temp1, P, n);
multMatrixWithVector(temp2, J, temp1);
crossProduct(c1, temp2, P);
// Ota asento huomioon hitausmomentissa
generateQuaternionMatrix(qMatrix, b2->orientation);
multMatrix(tempMatrix, qMatrix, b2->inverseMomentOfInertia);
transposeMatrix(qMatrix);
multMatrix(J, tempMatrix, qMatrix);
makeVector(P, p, b2->position);
crossProduct(temp1, P, n);
multMatrixWithVector(temp2, J, temp1);
crossProduct(c2, temp2, P);
temp1[0]=c1[0]+c2[0];
temp1[1]=c1[1]+c2[1];
temp1[2]=c1[2]+c2[2];
a/=b1->inverseMass + b2->inverseMass + dotProduct(temp1, n);
I[0]=a*n[0];
I[1]=a*n[1];
I[2]=a*n[2];
}
Tässä on vielä huomattava se, että äskeiset kaavat laskevat impulssin sille kappaleelle, jota kohden kosketuspisteen normaalivektori osoittaa. Toiselle kappaleella, eli sille, josta poispäin normaali osoittaa, impulssi on samansuuruinen, mutta vastakkaissuuntainen. Eli jos ensimmäiselle kappaleelle impulssi on I, on se toiselle -I. Lisäksi impulssia saa käyttää kosketuspisteessä vain, jos kappaleet liikkuvat siinä toisiaan kohti. On nimittäin mahdollista, että kappaleet koskettavat, mutta ovat erkanevassa liikkeessä.
Törmäystarkistuksen laskettua kaikki kosketuspisteet käy ne läpi. Jos kosketuspisteessä kappaleet liikkuvat toisiaan kohti laske impulssi ja muuta sen avulla kappaleiden nopeuksia. On mahdollista ja jopa yleistä, että kappaleiden nopeuksien muuttaminen impulssin avulla saa kappaleet liikkumaan toisiaan kohti jossain sellaisessa kosketuspisteessä jossa ne eivät vielä äsken tehneet niin. Tämän takia kosketuspisteet on käytävä läpi uudestaan jos yhtäkään impulssia on käytetty. Teoriassa tämän ei pitäisi johtaa päättymättömään silmukkaan, mutta tietokoneen rajallisen laskentatarkkuuden takia näin voi käydä, joten käytä jotain maksimi rajaa siitä kuinka monesti kosketuspisteet käydään läpi.
3. Esimerkkiohjelma #
Esimerkkiohjelmassa muutama kappale törmäilee suljetussa huoneessa. Huoneen seininä toimivat laatikot, joiden massa on ääretön ja ovat näin ollen immuuneja impulssien vaikutuksille.
Ohjelma toimii seuraavan algoritmin mukaisesti.
Toista
{
1. Etsi törmäystarkistuksen avulla kaikki kosketuspisteet.
2. Käy kosketuspisteitä läpi käyttäen impulssia aina tarvittaessa,
kunnes yksikään kosketuspiste ei enää tarvitse impulssia.
3. Edistä simulaatiota seuraavan aika-askeleen verran integraattorilla.
}
Esimerkkiohjelmamme on tällä kertaa huomattavan pitkä verrattuna edellisiin. Noin 1000 riviä koodia! Suurin osa tästä koodista tulee törmäystarkistuksesta, jolla ei varsinaisesti ole mitään tekemistä fysiikan kanssa.
Imuroi 2D-esimerkkiohjelma tästä.
http://www.suomipelit.com/files/artikkel...
 2D-esimerkkiohjelma
2D-esimerkkiohjelmaImuroi 3D-esimerkkiohjelma tästä.
http://www.suomipelit.com/files/artikkel...
 3D-esimerkkiohjelma
3D-esimerkkiohjelma4. Loppusanat #
Tässä osassa opit törmäyksistä. Huomaa, että tässä artikkelisarjassa esitellyt menetelmät eivät missään tapauksessa ole optimaalisia vaan tositilanteessa niitä käytettäessä pitää käyttää erinäisiä optimointeja. Esim. jos kappaleita on paljon pitää ne jäsentää jonkinnäköiseksi puuksi ja yrittää karsia yhdellä törmäystestillä suuria joukkoja. Lisäksi pallon ja laatikon lisäksi tarvitaan muitakin kappaleita kuten sylinteri, kartio, taso ja mielivaltainen monitahokas. Törmäystarkistus näiden kappaleiden kesken kuitenkin alkaa olla todella monimutkaista ja hidasta, joka korostaa optimoinnin tarvetta entisestään.
Seuraavassa osassa puhumme kitkasta ja helpolta kuulostavalta, mutta äärimmäisen hankalasta asiasta nimeltä lepokontakti.
Raportoithan kaikki tästä artikkelista löytämäsi virheet (niin kirjoitus-, kuin asiavirheetkin) osoitteeseen markus.ilmola@pp.inet.fi , niin korjaan ne mahdollisimman nopeasti. Myös kaikki kommentit ja kysymykset ovat tervetulleita.
Lopuksi linkkejä, joissa lisää luettavaa tähän mennessä opituista asioista.
David Baraffin artikkeli "Physically based modeling" osa 2:
http://www-2.cs.cmu.edu/~baraff/sigcours...
Chris Heckerin artikkeli "Collision response":
http://www.d6.com/users/checker/pdfs/gdm...
Kokoelma törmäystarkistusalgoritmeja:
http://www.realtimerendering.com/int/
Parhaan geometriakirjan "Geometric tools for Computer Graphics" kotisivu:
http://www.geometrictools.com/Books.html
